-
Amira Abdel-Rahman authoredAmira Abdel-Rahman authored

README.md 5.53 KiB
2.47 Bio-Inspired Robotics Final Project
Presentation
Proposal
Simulation
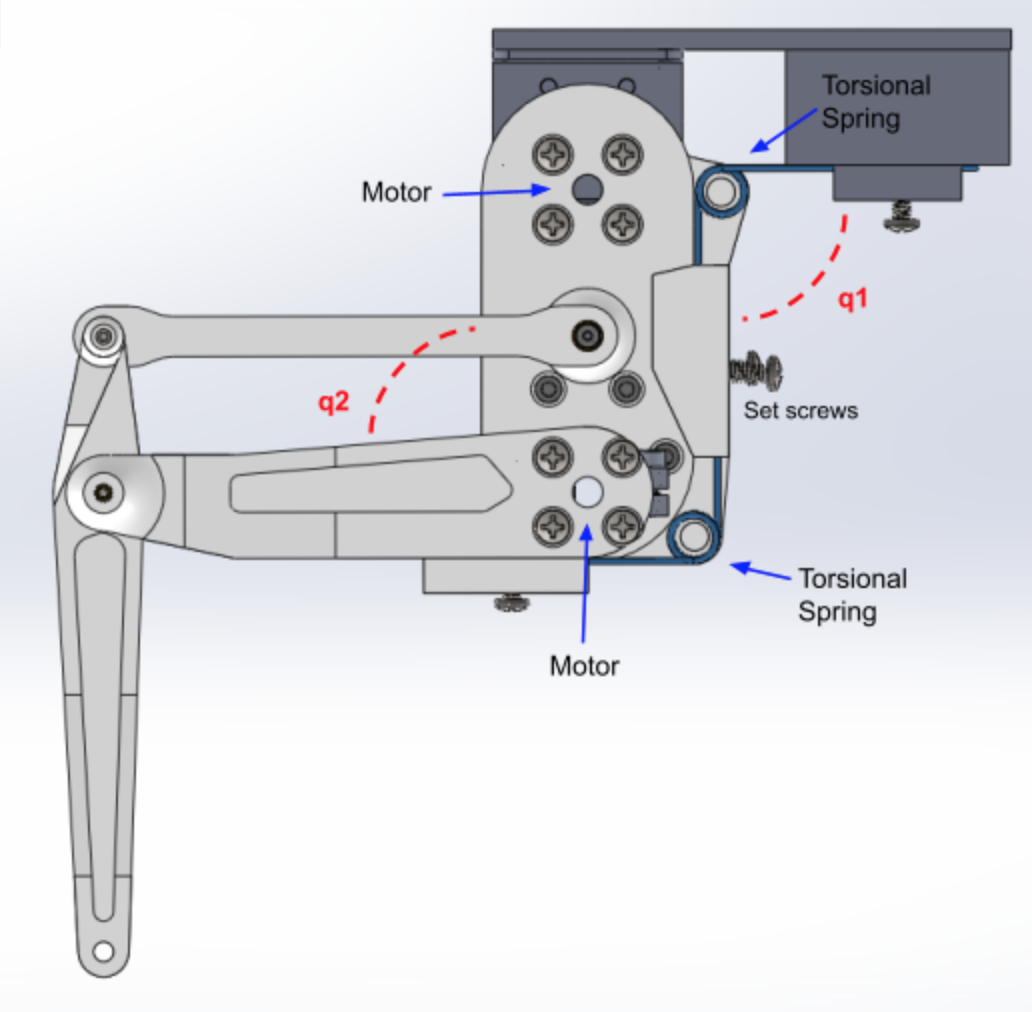
q = [\theta_1 ; \theta_2; x; y]; \\
\dot{q} = [\dot{\theta}_1 ; \dot{\theta}_2; \dot{x}; \dot{y}];Control
simulation/optimization
All torque control with bezier curves
hardware control
Get Bezier curve path of the leg from simulation/optimization and have an Impedance control (flight stage) and torque control (stance phase)
Optimization
Variables
Two Bezier curves for torques:
ctrl_1=[T_1,T_2,..T_n] \\
ctrl_2=[T_1,T_2,..T_n] \\
n=6 \\
-0.85<T_i<085Starting Conditions:
ground \ height = -0.164; \\
\theta_1=-36*\pi/180; \\
\theta_2=90*\pi/180;\\
x=y=0\\
\dot{\theta}_1=\dot{\theta}_2= 0\\
\dot{x}=\dot{y}= 0\\Constraints
x^{end}>=x^{start} \\
q_1^{end}=q_1^{start} \\
q_2^{end}=q_2^{start} \\
y^{end}=y^{start} \\
\dot{q}_1^{end}=\dot{q}_1^{start} \\
\dot{q}_2^{end}=\dot{q}_2^{start} \\
\dot{x}^{end}=\dot{x}^{start} \\
\dot{y}^{end}=\dot{y}^{start} \\Objective Function
- First objective: maximize height
h'to push it to go up, got the maxx' - Then I added to the constraints:
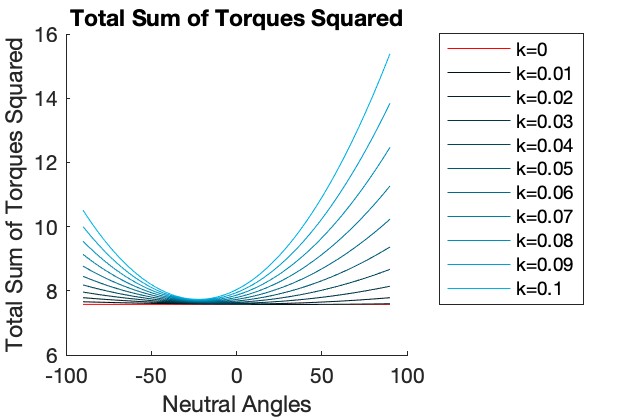
and minimized cost of transport by minimizing:
apex \ height = h' \\ x_{end}=x' \\which is the similar as minimizing sum of torque squared as m, g and d is fixedE/(m*g*d)
Updates and Results
5 December












2 December

