first weeks commit
parents
No related branches found
No related tags found
README.md
0 → 100644
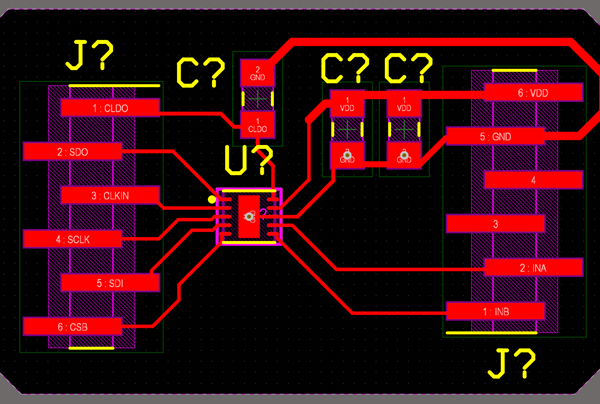
images/breakoutLDC1101.png
0 → 100644
{kind=link}
167 KiB
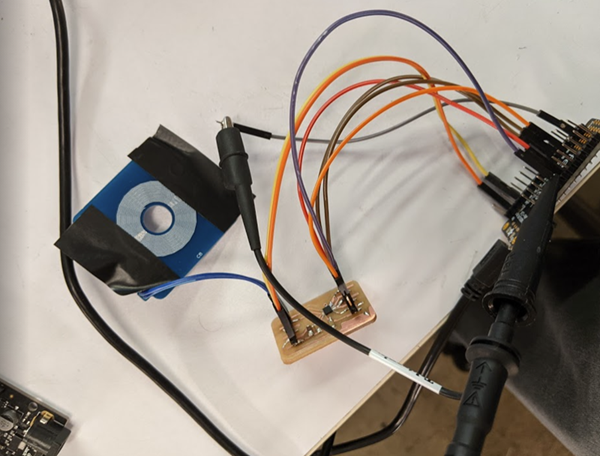
images/firstTest.png
0 → 100644
{kind=link}
370 KiB
167 KiB
370 KiB