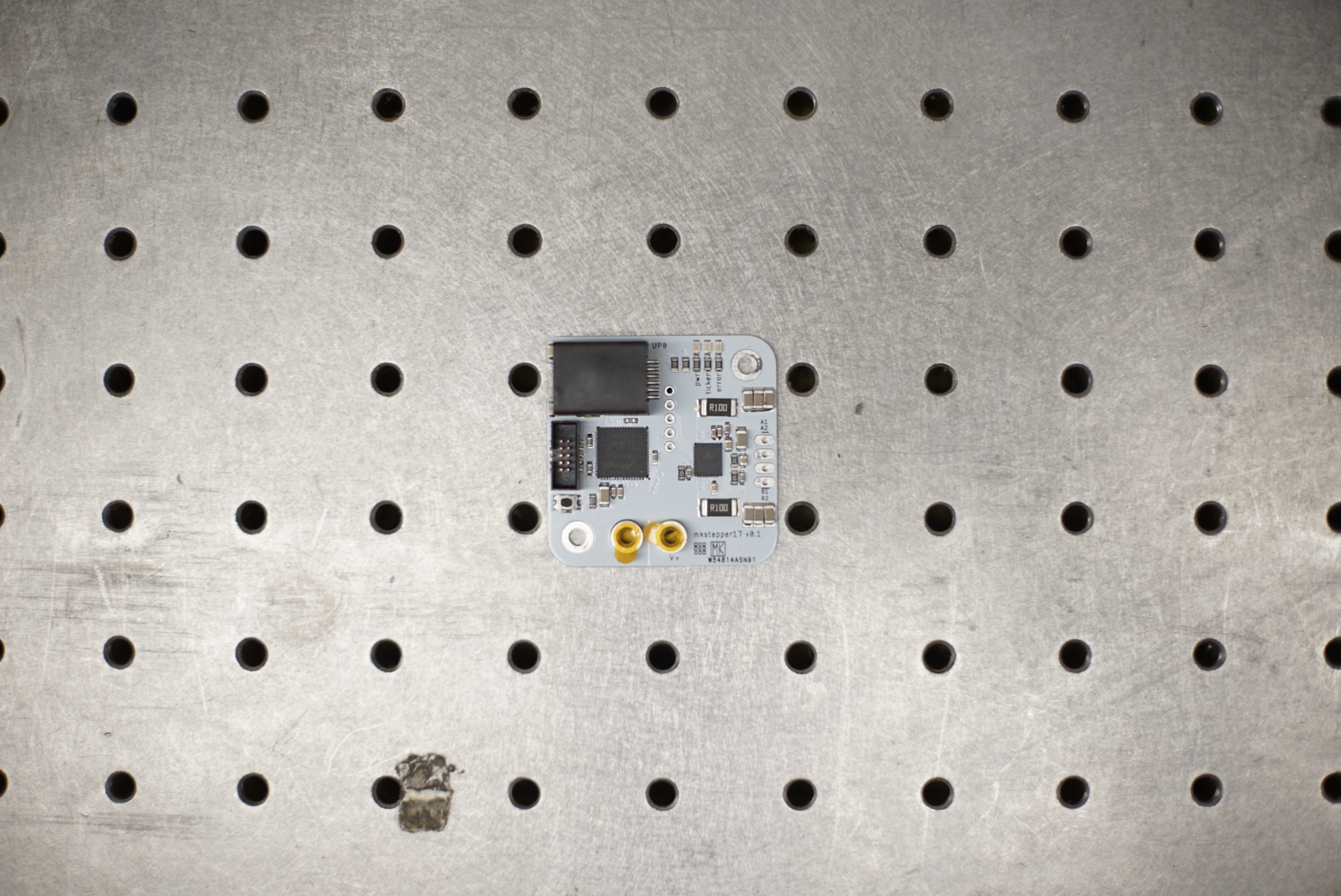
AutomataKit Stepper17
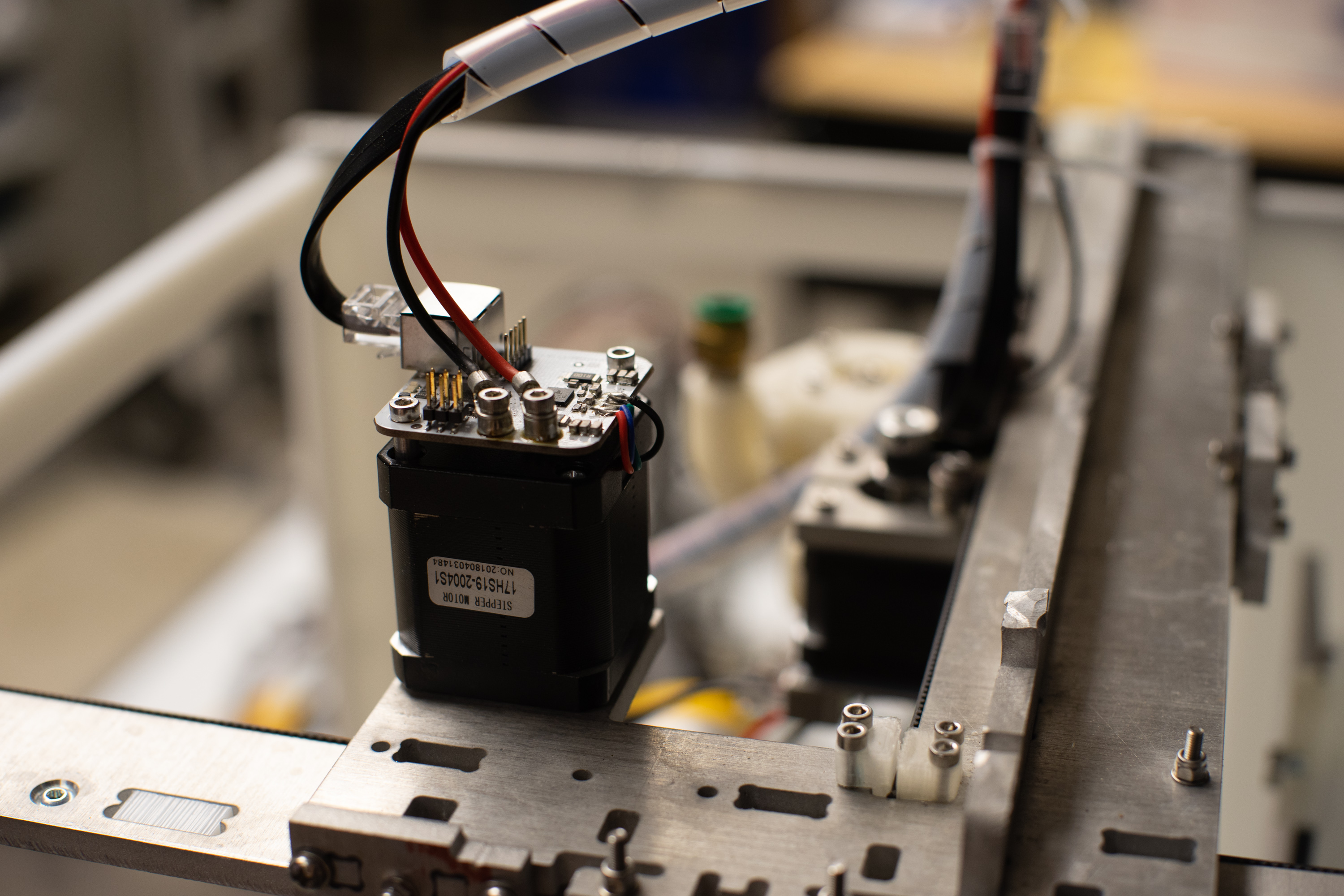
This is a motor driver for Nema 17 size Stepper Motors, which extends the automatakit architecture.
The board receives commands from an automatakit network and faithfully executes them, replying when complete.
Development Notes
See circuit chatter and firmware chatter.
FOR CODE use embedded at ATKStepper23
Viable Commands
Test
Keycode: 127
- to test networking, this will reply with a payload packet containing
127, 12, 24, 48and will toggle an LED on the board
Reset
Keycode: 128
- issues a software microcontroller reset
- if the microcontroller is already hung up, this will not work
Step Trapezoid
Keycode: 131 Arguments: Steps to Make, int32_t | Entry Speed, steps/s, uint32_t | Acceleration Rate, steps/s/s, uint32_t | Acceleration Length, steps to accelerate for, uint32_t | Decceleration Length, steps to deccelerate after, uint32_t Returns: Steps Made, int32_t | on step completion
- the stepper will load this block into its stepping buffer, and if the buffer is empty will execute the trapezoid. on it's completion, the stepper will reply with an acknowledgement
Step Wait
Keycode: 133 Arguments: Steps to Make, int32_t | Entry Speed, steps/s, uint32_t | Acceleration Rate, steps/s/s, uint32_t | Acceleration Length, steps to accelerate for, uint32_t | Decceleration Length, steps to deccelerate after, uint32_t Returns: Wait Made, uint8_t 24
- an identical block to the step trapezoid, but with a flag to avoid actually stepping. this is used in motion planning to insert a wait block for a motor with zero steps, to retain packet synchronization
Reproducing This Work
All automatakit works are open source, and while we cannot sell you boards, if you have an interesting application, get in touch to ask about collaborating.
To reproduce boards and load code, see the document 'Reproducing Automatakit Work'